Fastest drone with world record rate of climb
The fastest drone of the world needed for climbing to 100 m from the hover 3.871 sec. Confirmed by "Guinness World Records" and thus an official world record.
Why such a record?
I like to fly fast with drones or quadrocopters (FPV and free flight) and the idea came up to develop a really fast model. The view through video glasses from high altitude is always impressive. However, conventional drones or quadrocopters are rather slow during the ascent. A DJI Phantom 3 has a rate of climb of about 4 m/s. To get to 100 m altitude therefore 25 seconds are needed. Furthermore most of the models have big problems with a rapid descent. Most drones begin to wobble, which can lead into a crash. A fast and controlled descent is essential for a powerful drone or quadrocopter which is also capable to set up a "Guinness World Records”. Could be the attitude of the drone for example not recognize correctly in great highs a fast descent is helping enormously. Misjudge yourself with the battery power and get directly after the climb the first low voltage warning a rapid descent is the last resource. Often the model is lost in such a case, since the voltage of the flight batteries drops further and the motor controller can not adequately stabilize the drone during the descent. The rate of descent is limited in most drones, which is why the descent is long and almost empty battery ends with a crash.Could the drone falling like a stone from the sky and be intercepted shortly before the ground, much less battery power would be necessary. A drift from wind is also minimized. A slow descent is therefore disadvantageous.
What are the limits?
A chain always breaks at increasing tension at the weakest point.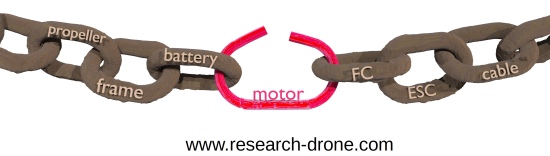
Foto: Dirk Brunner; Lizenz: CC BY SA 3.0
It is therefore important to know in advance the boundaries of the individual components for a world record quadrocopter. False selected components always cause problems. For example, if a too strong and so heavy engine is selected for the drone, the model aircraft is too heavy and therefore slow. If the motor is too weak, he will go up in smoke at the record flight. This means that each critical component should be optimally selected. The only exception is the propeller. This is not operated for safety reasons in the critical area. The risk of injury from propeller fragments is too large. Especially at the start, when the propeller will be greatly accelerated. The blade tip speed excess 200 m/s, making it faster than the projectile of a strong air rifle.
The critical components are:
- propeller
- motor
- motor controller
- battery pack
- Flight Control
Before the components search and supplier selection starts calculations and analyzes are carried out. There's a big difference whether a 10 kg model is necessary or a 1 kg lightweight model. The preliminary investigations provide us information about and save a lot of testing time.
Preliminary calculations for the Quadrocopter World Record
Using mathematical and physical models the drone for extreme climbs can be well calculated and optimized in advance. The test time is reduced dramatically.What influences are dominant at a fast climb?
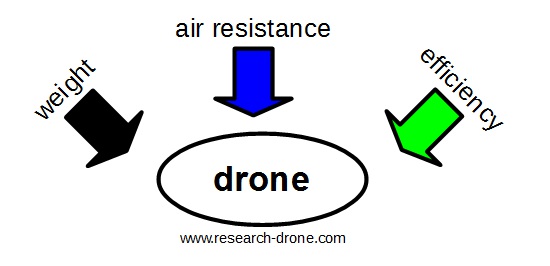
Foto: Dirk Brunner; Lizenz: CC BY SA 3.0
The main influences are
- air resistance
- Weight of the model
- Efficiency of the drive system
Each of these factors affects the 100 m time that is crucial for the quadrocopter world record. In order to achieve the least possible time, a high acceleration and a high speed at 100 m in height are required. A drone with high maximum speed and low acceleration values is not optimal for least 100 m times. How does the model characteristics affecting the 100 m time can be precisely calculated. We have developed an extensive set of formulas and tools over the years and can even calculate the most unusual quadrocopter or drones and develop them. For the basis of calculation more practical measurements are necessary because the producers of the components do not test them so excessive.
Limits at the World Record quadrocopter
- Motor (overheating, speed)
- Propeller (maximum speed)
- Motor controller (maximum current, voltage, field speed)
- Battery (maximum power, weight)
propeller for the world record drone
The propeller optimization is not easy, because from the hover (zero speed) to the maximum speed of the model the propeller should have a good efficiency. A fast RC model (Hotliner) has this problem only at startup. Otherwise the model always flying at a high airspeed and the propeller can be optimized for this case. For the drone a controllable pitch propeller would be optimal. However, this has an additional weight and increases the susceptibility to errors. Therefore a rigid propeller is used. The propellers are examined on a test stand for suitability and charged more than the recommended limits. Only when the propeller can withstand this and the measured values of the test stand are promising, the propeller is tested on the real drone.
Foto: Dirk Brunner; Lizenz: CC BY SA 3.0
Motor and motor controller search for a high power drone
The motor controller or ESC must be able to tolerate a high current and should be lightweight. In addition, the motor controller must have a high field speed, so that the motor comes to the appropriate speed. With regard to the field speed and possible reserves of power are available from most manufacturers gives only limited information. For this reason, practical tests have been carried out with the most promising controllers. This shows (2015), that the motor controller with the necessary high field speeds are unable to process the necessary current. Unfortunately, manufacturers are silent like when it comes to detailed technical information. Experience shows that manufacturers have to deal openly with the technical documentation they have most outstanding products. Due to the speed problem controllers are used at low speeds for a first field test model. But this also means that the engine must be an inrunner to bring the propeller to the required speed.
Foto: Dirk Brunner; Lizenz: CC BY SA 3.0
Overloaded engine

Foto: Dirk Brunner; Lizenz: CC BY SA 3.0
This ESC is damaged

Foto: Dirk Brunner; Lizenz: CC BY SA 3.0
This motor controller is also damaged

Foto: Dirk Brunner; Lizenz: CC BY SA 3.0
This motor does his last rotation

Foto: Dirk Brunner; Lizenz: CC BY SA 3.0
This motor goes up into smoke
Further tests with inrunners point to additional defects. A drone or quadrocopter with an inrunner flies and can also bring a good performance, but not high performance.
To this knowledge richer, more new controllers are tested. Here are all rise up into smoke, except one. Mostly it can be already predict whether the relevant ESC manages the test or not. Depending on the power semiconductor, installation situation and layout it can be predicted what the regulator can provide. Be it a simple plume by overloading or by insufficient field speeds. Most motor controller not survive the rigorous testing. But there is a ray of hope. A motor controller (ESC) survives all tough tests and running even after several fumed engines continue smoothly. This motor controller is able due to the high field speed to operate an outrunner. This engine type has numerous advantages compared to an inrunner when used in a drone or quadcopter.
After further calculations and tests with different engines, but always the same motor controller, a fitting combination is found. This combination includes the propeller. Thus, after many blown engines and motor controllers finally a high-performance power unit is found.
Lighting drone for position detection
With such a fast drone it is particularly important to identify clearly the attitude at high altitude. The model flies horizontally with more than 150 km/h. Wrong navigation is at these speeds is not beneficial. High-power LED are used for the model. LED strips can not be seen good from a great distance. In addition they suffer from a problem of space at the drone.
Foto: Dirk Brunner; Lizenz: CC BY SA 3.0
Flight Control for the world record drone
The Flight Control is also a critical component. The lightweight and more precise, the better. For first tests a very widespread Flight Control is used. In the first experiments on the test stand it is clear that this Flight Control for the control of a high power drone can not be used. The controllers have a software lock, so that the controller settings can not be made deep enough. The high performance drive system is simply too strong for this Flight Control. The manufacturer is contacted and asked to remove the software lock for us - unfortunately without success. Such experiences are bitter because they can not be detected in advance and only found out when the drone is ready to fly. Fortunately there are plenty of competitors. A matching Flight Control is found after further testing.First tests with the World Record drone

Foto: Dirk Brunner; Lizenz: CC BY SA 3.0
With the developed drive unit in August 2015 are the first small test flights. Already at this stage shows a high efficiency. After the data analysis the motor controller and the flight control is adjusted. The critical stages are the start, in which the propeller must be brought very quickly to a high speed and the high speed phase.
Further tests with the "Guinness World Records" drone
In September 2015, the first tests at high power take place. It shows in an impressive way, what this drive unit provides.A total drive power of 2.100 watts and a climb speeds of over 120 km/h is possible. The first 100 m times are around 4.5 s, although on only 3 s throttle. The remaining distance is flying the model further by the high kinetic energy. To the motors and motor controllers do not have to overload customized performance curves are flown. Easily give full throttle at the start will lead into crash.
Thus such a drone is intended not for beginners and for research purposes only. The engines comply with the burden limited.
Security due to the world record attempt with the drone
It is important that due to the record attempt no people or other things come to harm. The drone is an exception, since the drone can still be damaged by the extremely high power.Therefore, the following precautions have been taken for the security:
- Prior to instructing the people present about the dangers and rules of conduct, eg Do not enter security zone.
- Lightweight model (1 kg take-off weight)
- Short stay of a few seconds in height
- Strong lighting to the drone to identify clearly the attitude.
- Fail Safe is programmed so that in case of failure all engines will shut off at once
- Safety distance to the starting point. A safety zone has been set. There is no person may be present. An exception is the pilot.
- Flight over a field.
Altimetry by image analysis
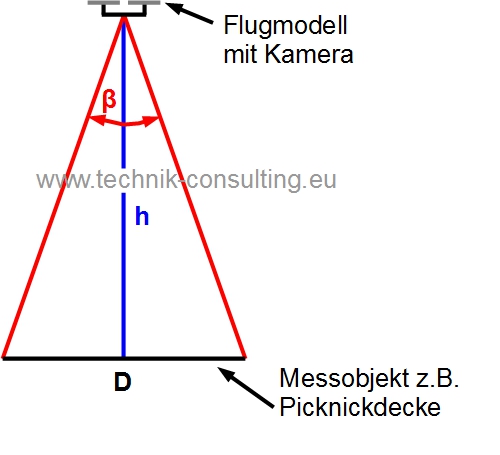
Foto: Dirk Brunner; Lizenz: CC BY SA 3.0
Most barometric sensors are unsuitable for detecting the height at such powerful models because:
- Response too slow.
- Good protection from the airstream is required
- Some sensors have trouble with the high accelerations and vibrations.
For use for the precise measurement of height of the drone our proven system of "Altimetry by image analysis" is used.
Also, a height measurement via laser triangulation is conceivable. The measurement should be easily understood by other people, which is why laser triangulation, radar measurement and similarly complicated procedures are not applied. Such a record should be broken at a reasonable cost. That is why we put an image analysis for the height measurement.
After several discussions with manufacturers of barometric measuring systems which can also be incorporated into drones, it is now possible to waive to the optical system. Appropriate adjustments, in consultation with a manufacturer, has been able to operate our barometric sensor with high accuracy and time resolution. Thus, two height sensors are in the model provide the same data in the ideal case.
Drone World Record Attempt
End of September, the first record attempt was scheduled but not performed due to windy weather.To carry out a Guinness World Records attempt there aer many things to consider. The safety of the persons involved is the most important. In addition, other official points must be met. These include an extended ascent permit, a commercial flight permit incl. Appropriate insurance.
Drone World Record Attempt number one
In early October the weather looks good and another record attempt is pending. In the morning the cloud cover is still quite low and the concern that the drone could disappear into the clouds is given. Under such circumstances no attempt is made. A line of sight to the quadcopter must always be present. Fortunately the clouds move away in the afternoon and the second record attempt can begin.The extended ascent approval has been granted, since more than 100 m altitude are to be expected. Police is also informed - as usual. The world record attempt can be performed.
The floor marking for the optical height measurement is built and a security zone is set up.
Numerous persons are invited. Including professors and doctors with the appropriate fields. After all individuals have arrived at the airfield the briefing takes place. All persons are located outside the security zone and the remote control and drone is turned on.
A few short test with the drone in the air and everything seems fine. As usual the model with the hot battery is highly toxic to the throttle lever. A first faster climb is performed and the model immediately begins to rotate around its own axis. All engines are cut off. Before the crash I try the drone by remote control to restart and stabilize the quadcopter again. The measures are to no avail and so the model from about 20 m height strikes on the ground. The record attempt is not possible on that day. Ahead of the model under almost the same conditions more than 100 times was sent with high power in the sky. There were never any problems. Sometimes the model wobble easily but returned to normal by gentle withdrawal of the throttle lever.

Foto: Dirk Brunner; Lizenz: CC BY SA 3.0
The damaged drone
That all engines go off hitherto not happened yet. The only difference was about a 40°C hot LiPo battery. Thereby the internal resistance decreases by about 30%. This was intentional and earlier I flew with heated LiPo batteries. But not from the start with full throttle.
After the data analysis the cause is found. Starting on the first faster climb unfortunately a drive unit is damaged. The flight control (FC) switches due to the uncontrolled attitude the remaining engines immediately of, making the model from about 20 meters altitude crashes. The cause of the crash is found after further testing but can not be excluded completely. A residual risk is always present.
After more than 100 successful climb flight in advance, this is a bitter defeat.
Drone World Record Attempt Number two
Luckily the crash was not a total loss. The drone could be repaired within two days. After the usual stress test is again all right and the third world record attempt with the drone is made.Mastered the official part (Advanced flight permission, police, etc.) successfully we meet at the airport.
The persons from the previous failed record attempt are invited back and appear happy. One told me that he has the sound of the propeller when accelerating still in the ear.

Foto: Dirk Brunner; Lizenz: CC BY SA 3.0
Witnesses perform protocol

Foto: Dirk Brunner; Lizenz: CC BY SA 3.0
The witnesses look at the drone exactly
The floor marking for the optical height measurement is constructed. Witnesses measure gradually confirm the correct diameter. The launch preparations have been completed successfully and the persons present have to leave the security zone.
After switching on the remote control and drone following a few tests. For safety reasons the batteries are not heated this time. The first short climbs went well and so can start a record hunt. The drone is placed just above the ground to hover and then added with a customized power curve. The quadcopter or drone rushes into the sky like a rocket. After about 50 meters of altitude it begins to wobble and I'll take the gas back gently. On the video this is recognizable. After that stabilizes the flight attitude and it continues at a frenetic pace upward. After about 100 meters are achieved as soon as possible the descent starts. More climbs follows. Finally the camera is rotated on the drone by 90 degrees and records the people involved during the climb. The result is a beautiful panorama of Munich. The Olympic Tower and the "Hochhaus Uptown München" (O2 Tower) can be seen.
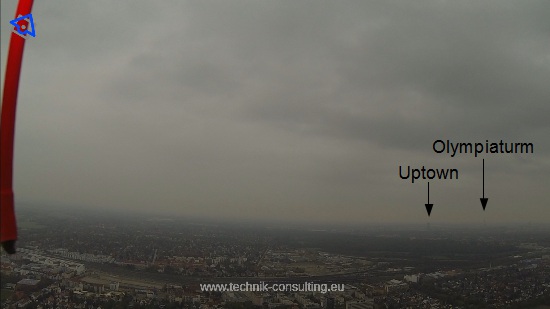
Foto: Dirk Brunner; Lizenz: CC BY SA 3.0
Panorama of Munich
After the climb flight the data are evaluated. Both the optical height measurement and the barometric sensor deliver nearly congruent data. The least time to 100 vertical meters (more precisely 101 meters of altitude to be sure) is achieved in the fifth climb. The drone requires from the hover up to 100 meters in altitude 3,871 s and thus set up a new world record for drones or quadcopter. Confirmed by "Guinness World Records".

Foto: Dirk Brunner; Lizenz: CC BY SA 3.0
The world record drone
We habe also a bit of luck seen at the weather. About an hour after the record it begins to rain.
The technical data of world record drone are:
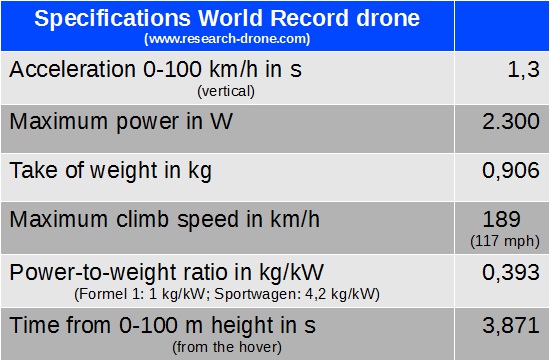
Foto: Dirk Brunner; Lizenz: CC BY SA 3.0

Foto: Dirk Brunner; Lizenz: CC BY SA 3.0
Other interesting facts:
Blade tip speed over 200 m/s or 718 km/h (446 mph)
The maximum rate of climb is 52,5 m/s (189 km/h or 117 mph). A passenger plane reached at a fast climb after takeoff about 25 m/s climb rate.
I would like to thank all involved persons and companies who have contributed to set up the record.
Particularly:
flyduino

University of applied sciences munich
(Prof. Dr. rer. nat. Michael Sachs)
(Prof. Dr.-Ing. Frank Palme)
Support in drone development and research
If you need a special drone with exceptional performance, please contact us. We support you in the development, construction, optimization and controller setting.Note
The calculations can be adapted for all airplanes. Whether motor sailer, F3J, model helicopters or multicopter.
contact