Schnellste Drohne der Welt mit Weltrekord Steigleistung
Die schnellste Drohne der Welt benötigt für das Steigen auf 100 m aus dem Schwebeflug 3,871 s. Bestätigt durch „Guinness World Records“ und damit ein offizieller Weltrekord.
Warum so ein Rekord?
Da ich gerne etwas flotter mit Drohnen bzw. Quadrocoptern fliege (FPV und Freiflug) steht es nahe ein wirklich schnelles Modell zu entwickeln. Der Blick durch eine Videobrille aus der Höhe ist immer wieder beeindruckend. Allerdings sind herkömmliche Drohnen bzw. Quadrocopter beim Aufstieg eher langsam. Ein DJI Phantom 3 steigt etwa mit 4 m/s. Um auf 100 m Flughöhe zu kommen sind demnach 25 Sekunden notwendig. Weiterhin haben die meisten Modelle große Probleme bei schnellem Sinkflug. Die meisten Drohnen fangen an wild hin und her zu schaukeln, was bis zum Absturz führen kann. Ein schneller und kontrollierter Sinkflug ist essentiell bei einer leistungsstarken Drohne bzw. Quadrocopter, der auch in der Lage ist einen „Guinness World Records“ aufzustellen. Kann beispielsweise in der Höhe die Fluglage nicht mehr ausgemacht werden, so hilft ein schneller Sinkflug enorm. Verschätzen Sie sich mit der Akkuenergie und bekommen direkt nach dem Aufstieg die erste Unterspannungswarnung, ist ein schneller Sinkflug die letzte Rettung. Oft ist das Modell in so einem Fall verloren, da die Spannung des Flugakkus weiter sinkt und die Regler im Sinkflug das Modell nicht mehr ausreichend stabilisieren können. Die Sinkgeschwindigkeit ist bei den meisten Drohnen begrenzt, weshalb der Abstieg lange dauert und bei fast leerem Akku mit einem Crash endet.Könnte die Drohne wie ein Stein vom Himmel fallen und kurz vor dem Boden abgefangen werden, wäre deutlich weniger Akkuenergie notwendig. Ein Abtrieb durch Wind wird ebenfalls minimiert. Ein langsamer Sinkflug ist deshalb von Nachteil.
Welche Grenzen gibt es?
Eine Kette reißt bei steigender Zugkraft immer an der schwächsten Stelle.
Foto: Dirk Brunner; Lizenz: CC BY SA 3.0
Deshalb ist es wichtig im Vorfeld die Grenzen der einzelnen Komponenten für einen Weltrekord Quadrocopter zu kennen. Falsch ausgewählte Bauteile führen immer zu Problemen. Wird beispielsweise ein zu starker und damit schwerer Motor für die Drohne ausgewählt, ist das Flugmodell zu schwer und damit langsam. Ist der Motor zu schwach, wird dieser beim Rekordflug in Rauch aufgehen. Dies bedeutet, das jede kritische Komponente optimal ausgewählt werden muss. Einzige Ausnahme ist der Propeller. Dieser wird aus Sicherheitsgründen nicht im kritischen Bereich betrieben. Die Verletzungsgefahr durch umherfliegende Propellerfragmente ist zu groß. Vor allem beim Start, wenn die Propeller stark beschleunigt werden. Die Blattspitzengeschwindigkeit liegt bei über 200 m/s und ist damit schneller als das Projektil eines starken Luftgewehrs.
Die kritischen Komponenten sind:
- Propeller
- Motor
- Motorregler
- Akku
- Flight Control
Bevor die Komponentensuche bzw. Lieferantenauswahl beginnt werden einige Vorberechnungen und Analysen durchgeführt. Es ist ein großer Unterschied, ob ein 10 kg schweres Modell notwendig ist oder ein 1 kg leichtes Modell. Die Voruntersuchungen geben hierüber Auskunft und sparen viel Testzeit.
Vorberechnungen für den Drohnen Weltrekord
Mit mathematischen und physikalischen Modellen lässt sich eine Drohne für extreme Steigflüge gut im Vorfeld berechnen und optimieren. Dadurch sinkt die Testzeit bzw. Versuchszeit drastisch.Welche Einflüsse überwiegen bei einem schnellen Steigflug?
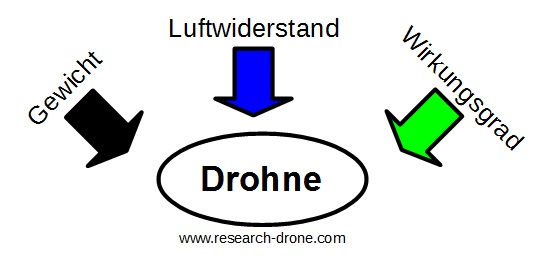
Foto: Dirk Brunner; Lizenz: CC BY SA 3.0
Die wichtigsten Einflüsse sind:
- Luftwiderstand
- Gewicht des Modells
- Wirkungsgrad des Antriebssystems
Jeder dieser Einflüsse wirkt sich auf die 100 m Zeit aus, die für den Quadrocopter Weltrekord entscheidend ist. Um eine möglichst geringe Zeit zu erreichen, sind eine hohe Beschleunigung und eine hohe Geschwindigkeit auf 100 m Höhe erforderlich. Eine Drohne mit hoher Maximalgeschwindigkeit und geringen Beschleunigungswerten ist für kleine 100 m Zeiten nicht optimal. Wie sich die Modelleigenschaften auf die 100 m Zeit auswirkt lässt sich präzise berechnen. Über die Jahre haben wir einen umfangreichen Formelsatz und weitere Tools entwickelt und können selbst die ausgefallensten Quadrocopter und Drohnen berechnen und entwickeln. Für die Berechnungsgrundlage sind weitere praktische Messungen erforderlich, da die Hersteller die Komponenten bei weitem nicht so hoch belasten.
Belastungsgrenzen bei der Weltrekord Drohne
- Motor (Überhitzung, Drehzahl)
- Propeller (maximale Drehzahl)
- Motorregler (maximaler Strom, Spannung, Felddrehzahl)
- Akku (maximale Leistung, Gewicht)
Propellersuche für die Weltrekord Drohne
Die Propelleroptimierung ist nicht einfach, da aus dem Schwebeflug (Geschwindigkeit null) bis Maximalgeschwindigkeit der Propeller einen guten Wirkungsgrad besitzen soll. Ein schnelles RC-Modell (z.B. Hotliner) hat dieses Problem nur beim Start. Ansonsten bewegt sich das Modell immer mit einer hohen Fluggeschwindigkeit und der Propeller kann für diesen Fall optimiert werden. Für die Drohne wäre ein Verstellpropeller optimal. Dieser hat jedoch ein Zusatzgewicht und erhöht die Fehleranfälligkeit. Deswegen wird ein starrer Propeller eingesetzt. Die Propeller werden auf einem Teststand auf Tauglichkeit untersucht und weit über die empfohlenen Grenzen belastet. Erst wenn der Propeller dies übersteht und die Messwerte des Teststands vielversprechend sind, wird die Luftschraube an der realen Drohne getestet.
Foto: Dirk Brunner; Lizenz: CC BY SA 3.0
Motor- und Reglersuche für eine Hochleistungs-Drohne
Der Motorregler bzw. ESC muss einen hohen Strom verarbeiten können und leicht sein. Zusätzlich muss der Motorregler eine hohe Felddrehzahl besitzen, damit der Motor auf die entsprechende Drehzahl kommt. Bezüglich der Felddrehzahl und eventueller Leistungsreserven gibt es von den meisten Herstellern nur begrenzte Informationen. Aus diesem Grund sind praktische Tests mit den vielversprechendsten Reglern durchgeführt worden. Dabei zeigt sich (Stand: 2015), dass die Regler mit den notwendigen hohen Felddrehzahlen nicht in der Lage sind den notwendigen Strom zu verarbeiten. Hersteller schweigen leider gerne, wenn es um detaillierte technische Auskünfte geht. Die Erfahrung zeigt, dass Hersteller die offen mit den technischen Unterlagen umgehen meistens hervorragende Produkte haben. Aufgrund der Drehzahlproblematik werden Regler mit geringen Felddrehzahlen für ein erstes Testmodell eingesetzt. Dies bedeutet aber auch, dass der Motor ein Innenläufer sein muss um den Propeller auf die erforderliche Drehzahl zu bringen.
Foto: Dirk Brunner; Lizenz: CC BY SA 3.0
Überlasteter Motor

Foto: Dirk Brunner; Lizenz: CC BY SA 3.0
Diese ESC hat es hinter sich

Foto: Dirk Brunner; Lizenz: CC BY SA 3.0
Auch diese ESC ist defekt durch Überlastung

Foto: Dirk Brunner; Lizenz: CC BY SA 3.0
Dieser Motor ist hinüber

Foto: Dirk Brunner; Lizenz: CC BY SA 3.0
Auch dieser Motor wurde kaputt getestet
Weitere Tests mit Innenläufern zeigen zusätzliche Mängel auf. Eine Drohne bzw. Quadrocopter mit Innenläufer fliegt und kann auch eine gute Leistung bringen, aber keine Höchstleistung.
Um diese Erkenntnis reicher, werden weitere neue Regler getestet. Dabei gehen bis auf einen Motorregler alle in Rauch auf. Meistens lässt sich schon vorhersagen, ob die betreffende ESC den Test schafft oder nicht. Je nach verwendeter Leistungshalbleiter, Einbausituation und Layout kann prognostiziert werden, was der Regler schaffen kann. Sei es eine Rauchfahne durch einfache Überlastung oder durch zu geringe Felddrehzahlen. Die meisten Motorregler überstehen die harten Tests nicht. Doch es gibt einen Lichtblick. Ein Regler übersteht alle harten Tests und läuft auch nach mehreren abgerauchten Motoren problemlos weiter. Dieser Motorregler ist durch die hohe Felddrehzahl in der Lage einen Außenläufer zu betreiben. Diese Motorbauart besitzt bei Einsatz in einem Quadrocopter zahlreiche Vorteile im Vergleich zu einem Innenläufer.
Nach weiteren Berechnungen und Tests mit unterschiedlichen Motoren, aber immer dem gleichem Motorregler, ist eine passende Kombination gefunden. Diese Kombination schließt den Propeller mit ein. Damit ist nach vielen durchgebrannten Motoren und Motorreglern endlich eine hochleistungsfähige Antriebseinheit gefunden.
Beleuchtung Drohne für Lageerkennung
Bei einem so schnellen Quadrocopter ist es besonders wichtig auch in großer Höhe eindeutig die Fluglage zu erkennen. Das Modell ist in der Ebene mit weit über 150 km/h unterwegs. Ein Versteuern ist bei diesen Geschwindigkeiten nicht von Vorteil. Für das Modell kommen hochleistungs LED zum Einsatz. LED Bänder oder LED Leisten sind aus großer Entfernung nicht gut zu erkennen. Zudem gibt es dabei ein Platzproblem an der Drohne.
Foto: Dirk Brunner; Lizenz: CC BY SA 3.0
Flight Control für die Weltrekord Drohne
Die Flight Control ist ebenfalls eine kritische Komponente. Je leichter und präziser, umso besser. Für erste Tests wird eine sehr weit verbreitete Flight Control verwendet. Bei den ersten Versuchen am Teststand wird klar, dass diese Flight Control für die Regelung einer Hochleistungs Drohne nicht eingesetzt werden kann. Die Regler besitzen eine Softwaresperre, so dass die Reglereinstellungen nicht tief genug vorgenommen werden können. Das Hochleistungs Antriebssystem ist schlicht zu stark für diese Flight Control. Der Hersteller wird kontaktiert und gebeten die Softwaresperre für dieses Modell zu entfernen – leider ohne Erfolg. Solche Erfahrungen sind bitter, da diese im Vorfeld nicht erkannt werden können sondern erst bei der flugfertigen Drohne . Glücklicherweise gibt es genügend Wettbewerber. Eine passende Flight Control ist nach weiteren Tests gefunden.Erste Tests mit dem Weltrekord Quadrocopter

Foto: Dirk Brunner; Lizenz: CC BY SA 3.0
Mit der entwickelten Antriebseinheit stehen im August 2015 die ersten kleinen Testflüge an. Schon dabei zeigt sich eine hohe Leistungsfähigkeit. Nach der Datenauswertung wird der Motorregler und die Fluglageregelung weiter angepasst. Die kritischen Phasen sind der Start, in der die Propeller sehr schnell auf eine hohe Drehzahl gebracht werden müssen und die Phase hoher Geschwindigkeit.
Weitere Tests mit der „Guinness World Records“ Drohne
Im September 2015 stehen das erste Mal Tests mit hoher Leistung an. Dabei zeigt sich in beeindruckender Weise, was diese Antriebseinheit leistet.Eine gesamte Antriebsleistung von über 2.100 Watt sowie Steiggeschwindigkeiten von über 120 km/h sind möglich. Die ersten 100 m Zeiten liegen um 4,5 s, obwohl nur 3 s Gas gegeben wird. Die restliche Strecke fliegt das Modell durch die hohe kinetische Energie weiter. Um die Motoren und Motorregler nicht zu überlasten müssen angepasste Leistungskurven geflogen werden. Einfaches Vollgas geben führt zu einem Absturz.
So ein Quadrocopter ist nichts für Anfänger und nur für Forschungszwecke gedacht. Die Motoren halten die Belastungen nur begrenzt durch.
Sicherheit bei dem Weltrekordversuch mit dem Quadrocopter
Mir ist wichtig, dass bei dem Rekord keine Personen oder andere Dinge zu Schaden kommen. Die Drohne ist davon ausgenommen, da bei den extrem hohen Leistungen die Drohne immer Schaden nehmen kann.Für die Sicherheit sind deshalb folgende Vorkehrungen getroffen:
- Im Vorfeld Instruktion der anwesenden Personen über die Gefahren und Verhaltensregeln z.B. Sicherheitszone nicht betreten.
- Leichtes Modell (1 kg Abfluggewicht)
- Kurze Aufenthaltsdauer von einigen Sekunden in der Höhe
- Starke Beleuchtung um die Drohne und die Fluglage erkennen zu können.
- Fail Safe ist so programmiert, dass im Fehlerfall alle Motoren sofort aus gehen.
- Sicherheitsabstand zum Startort. Eine Sicherheitszone ist eingerichtet. Dort darf sich keine Person aufhalten. Ausnahme ist der Pilot.
- Flug über einem Acker.
Höhenmessung mittels Bildanalyse
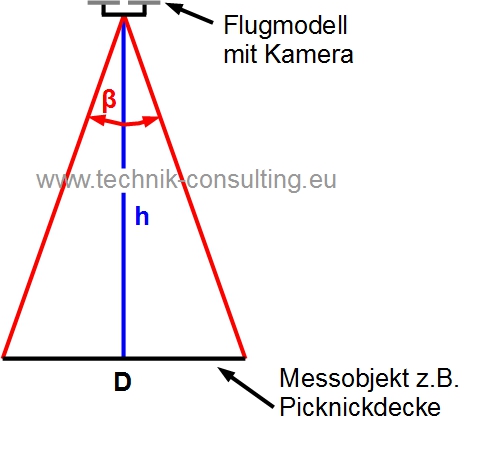
Foto: Dirk Brunner; Lizenz: CC BY SA 3.0
Die meisten barometrische Sensoren sind für die Erfassung der Höhe bei solch leistungsstarken Modellen ungeeignet, da:
- Ansprechzeit zu langsam.
- Gute Abschirmung vom Fahrtwind erforderlich
- Manche Sensoren haben Schwierigkeiten mit den hohen Beschleunigungen und Vibrationen.
Zum Einsatz für die präzise Höhenmessung der Dohne kommt deswegen unser bewährtes System der "Höhenmessung mittels Bildanalyse".
Auch eine Höhenmessung über Lasertriangulation ist denkbar. Die Messung soll leicht von anderen Menschen nachvollzogen werden können, weswegen Lasertriangulation, Radarmessung und ähnlich komplizierte Verfahren nicht angewendet werden. So ein Rekord soll schließlich mit vertretbarem Aufwand gebrochen werden können. Deswegen setzen wir die Bildanalyse für die Höhenmessung ein.
Nach mehreren Gesprächen mit Herstellern von barometrischen Messsystemen, welche auch in Drohnen eingebaut werden können, ist es mittlerweile möglich auf das optische System zu verzichten. Durch entsprechende Anpassungen, in Rücksprache mit einem Hersteller, ist es uns gelungen den barometrischen Sensor auch mit hoher Genauigkeit und Zeitauflösung zu betreiben. Somit sind zwei Höhensensoren im Modell, die im Idealfall gleiche Daten liefern.
Drohne Weltrekordversuch
Ende September wurde der erste Rekordversuch angesetzt, aber wegen zu windigem Wetter nicht durchgeführt.Für die Durchführung eines ¨Guinness World Records¨ Versuches sind viele Dinge zu beachten, wobei mir die Sicherheit der beteiligten Personen am wichtigsten ist. Zusätzlich müssen weitere offizielle Punkte erfüllt werden. Dazu zählen beispielsweise eine erweiterte Aufstiegsgenehmigung, eine gewerbliche Flugerlaubnis incl. passender Versicherung.
Drohne Weltrekordversuch Nummer eins
Anfang Oktober sieht das Wetter gut aus und ein weiterer Rekordversuch steht an. Am Morgen ist die Wolkendecke noch recht tief und die Sorge, dass die Drohne bzw. Quadrocopter in den Wolken verschwindet gegeben. Unter solchen Umständen wird kein Versuch unternommen. Eine Sichtverbindung zur Drohne muss immer vorhanden sein. Glücklicherweise verziehen sich die Wolken gegen Nachmittag und der zweite Rekordversuch kann beginnen.Die erweiterte Aufstiegsgenehmigung ist erteilt worden, da über 100 m Flughöhe zu erwarten sind. Polizei ist ebenfalls informiert – wie üblich. Der Weltrekordversuch kann durchgeführt werden.
Die Bodenmarkierung für die optische Höhenmessung wird aufgebaut und eine Sicherheitszone eingerichtet.
Zahlreiche Personen sind eingeladen. Darunter Professoren und Doktoren mit den entsprechenden Fachgebieten. Nachdem alle Personen am Flugplatz eingetroffen sind, erfolgt die Einweisung. Alle Personen befinden sich außerhalb das Sicherheitszone und die Fernsteuerung und Drohne wird eingeschaltet.
Ein paar kurze Test mit der Drohne in der Luft und alles scheint in Ordnung. Wie gewohnt ist das Modell mit dem heißen Akku sehr giftig am Gashebel. Ein erster schnellerer Steigflug wird durchgeführt und das Modell beginnt sich sofort um die eigene Achse zu drehen. Alle Motoren sind aus. Während dem Absturz versuche ich die Drohne über die Fernsteuerung neu zu starten, damit sich der Quadrocopter wieder stabilisiert. Die Maßnahmen sind ohne Erfolg und so schlägt das Modell aus ca. 20 m Höhe am Boden auf. Der Rekordversuch ist damit an diesem Tage nicht möglich. Im Vorfeld wurde das Modell unter fast gleichen Bedingungen über 100 mal mit hoher Leistung in den Himmel geschickt. Es gab nie Probleme. Manchmal brach das Modell leicht aus, was sich durch sanfte Zurücknahme des Gashebels aber wieder normalisierte.

Foto: Dirk Brunner; Lizenz: CC BY SA 3.0
Kaputte Drohne
Das alle Motoren ausgingen ist bis dahin noch nicht passiert. Der einzige Unterschied war ein ca. 40°C heißer LiPo Akku. Dadurch sinkt der Innenwiderstand um ca. 30% ab. Dies war gewollt und schon früher bin ich mit aufgeheizten LiPo-Akkus geflogen. Allerdings nicht von Beginn an mit höchster Leistung.
Nach der Datenauswertung ist die Ursache gefunden. Mit Beginn des ersten schnelleren Steigfluges verabschiedet sich leider eine Antriebseinheit. Die Fluglageregelung schaltet aufgrund der unkontrollierten Fluglage die restlichen Motoren sofort ab, womit das Modell aus ca. 20 Metern Flughöhe abstürzt. Die Ursache des Absturzes ist nach weiteren Tests gefunden, lässt sich aber nicht ganz ausschließen. Ein Restrisiko ist immer vorhanden.
Nach über 100 erfolgreichen Steigflügen im Vorfeld ist dies eine herbe Niederlage.
Drohne Weltrekordversuch Nummer zwei
Zum Glück war der Absturz kein Totalschaden. Die Drohne konnte innerhalb von zwei Tagen repariert werden. Nach den üblichen Belastungstests ist wieder alles in Ordnung und der dritte Weltrekordversuch mit dem Quadrocopter wird unternommen.Den offiziellen Part (erweiterte Aufstiegserlaubnis, Polizei etc.) erfolgreich gemeistert geht es ab zum Flugplatz.
Die Personen vom vorherigen missglückten Rekordversuch sind wieder eingeladen und erscheinen gerne. Einer erzählt mir, dass er das Geräusch der Propeller beim Beschleunigen immer noch im Ohr hat.

Foto: Dirk Brunner; Lizenz: CC BY SA 3.0
Zeugen führen Protokoll

Foto: Dirk Brunner; Lizenz: CC BY SA 3.0
Die Zeugen sehen sich die Drohne genau an
Die Bodenmarkierung für die optische Höhenmessung ist aufgebaut. Zeugen messen nach und bestätigen den korrekten Durchmesser. Die Startvorbereitungen sind erfolgreich beendet und die anwesenden Personen müssen die Sicherheitszone verlassen.
Nach Einschalten der Fernsteuerung und Drohne folgen ein paar Tests. Aus Sicherheitsgründen sind die Akkus diesmal nicht aufgeheizt. Die ersten kurzen Steigflüge verlaufen gut und so kann die Rekordjagt beginnen. Die Drohne wird knapp über dem Boden zum Schwebeflug gebracht und anschließend mit einer angepassten Leistungskurve Gas gegeben. Der Quadrocopter bzw. Drohne saust in den Himmel wie eine Silvesterrakete. Nach ca. 50 Höhenmetern fängt er an auszubrechen und ich nehme das Gas sanft zurück. Auf den Videos ist dies erkennbar. Danach stabilisiert sich die Fluglage und es geht weiter mit sehr hohem Tempo nach oben. Nachdem über 100 Höhenmeter erreicht sind, erfolgt so schnell wie möglich der Sinkflug. Weitere Steigflüge folgen. Zum Schluss wird die Kamera an der Drohne um 90 Grad gedreht und die beteiligten Personen während des Steigflugs aufgenommen. Dabei entsteht ein schönes Panorama von München. Der Olympiaturm sowie das „Hochhaus Uptown München“ (O2 Tower) sind zu erkennen.
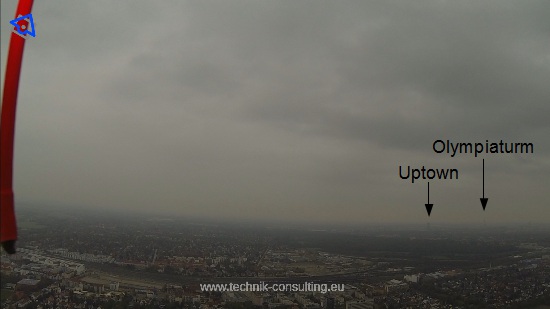
Foto: Dirk Brunner; Lizenz: CC BY SA 3.0
Blick über München
Nach den Steigflügen werden die Daten ausgewertet. Sowohl die optische Höhenmessung als auch der barometrische Sensor liefern nahezu deckungsgleiche Daten. Die geringste Zeit um auf 100 Höhenmeter (genauer 101 Höhenmeter um sicher zu gehen) wird beim fünfte Steigflug erreicht. Die Drohne benötigt vom Schwebeflug bis zu 100 Höhenmeter 3,871 s und stellt damit einen neuen Weltrekord für Drohnen bzw. Quadrocopter auf. Bestätigt durch „Guinness World Records“.

Foto: Dirk Brunner; Lizenz: CC BY SA 3.0
Die Weltrekord Drohne
Das auch eine Portion Glück dazugehört zeigt sich beim Wetter. Eine knappe Stunde nach dem Rekord beginnt es zu regnen.
Die technischen Daten der Weltrekord Drohne sind:

Foto: Dirk Brunner; Lizenz: CC BY SA 3.0

Foto: Dirk Brunner; Lizenz: CC BY SA 3.0
Weitere interessante Fakten über die Weltrekord Drohne
- Blattspitzengeschwindigkeit über 200 m/s oder 718 km/h.
- Die maximale Steigrate beträgt 52,5 m/s (189 km/h). Ein Passagierflugzeug erreicht bei einem schnellem Steigflug nach dem Start ca. 25 m/s Steigrate.
Bedanken möchte ich mich bei allen beteiligten Personen und Unternehmen, die den Rekord ermöglicht haben.
Insbesondere:
flyduino

Hochschule München
(Prof. Dr. rer. nat. Michael Sachs)
(Prof. Dr.-Ing. Frank Palme)
Unterstützung in der Drohnen Entwicklung und Forschung
Wenn Sie eine besondere Drohne mit außergewöhnlichen Leistungen benötigen, melden Sie sich. Wir unterstützen bei der Entwicklung, dem Bau, Optimierung und Reglereinstellung.Hinweis
Die Berechnungen lassen sich für alle Flugmodelle anpassen. Egal ob Motorsegler, F3J, Modellhelikopter oder Multicopter.
Sprechen Sie mit uns.